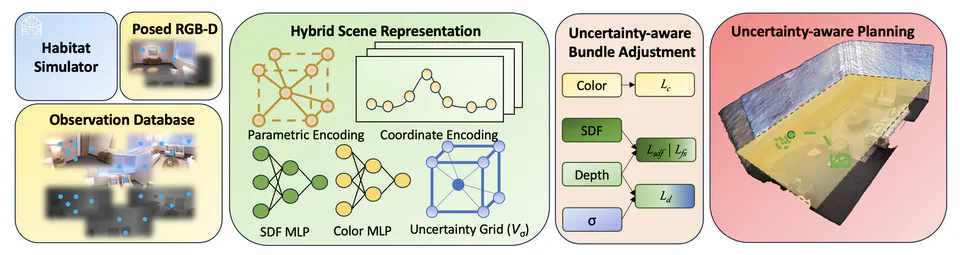
We designed a neural active reconstruction system that integrates a hybrid neural representation with uncertainty learning to enable high-fidelity surface reconstruction and published an open-source package showcasing this work.
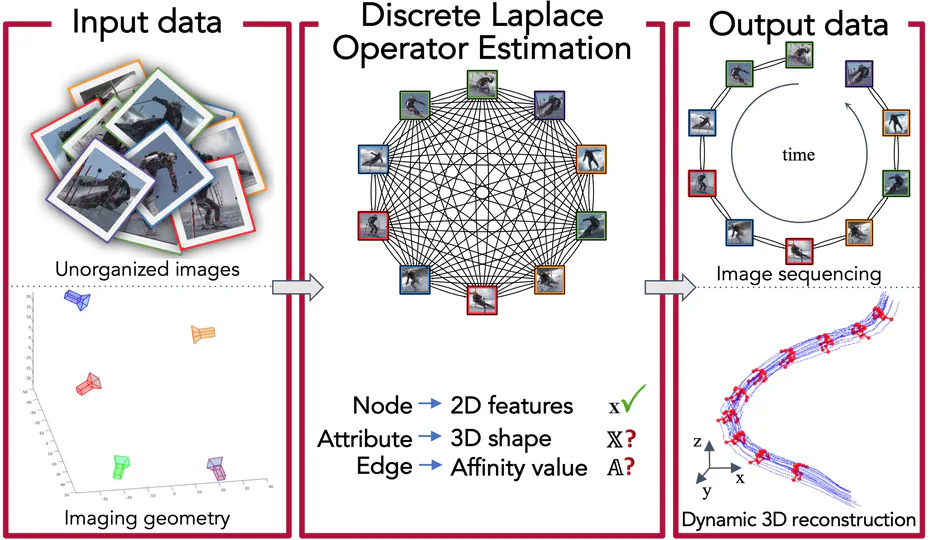
I developed a self-supervised learning framework for reconstructing sparse dynamic 3D geometry and recovering spatio-temporal relationships from 2D observations, and I also published an open-source package based on this work.
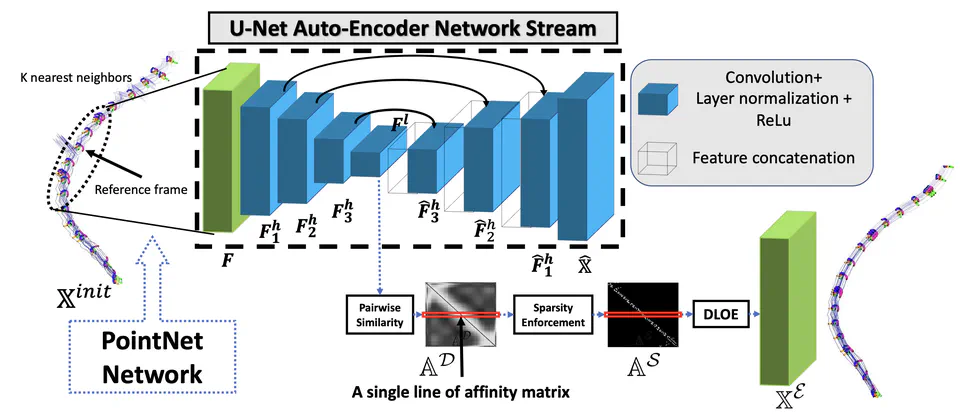
I developed a general paradigm for sparse dynamic 3D point reconstruction and image sequence recovery from multiple views and published an open-source package, DLOE, for dynamic 3D reconstruction.
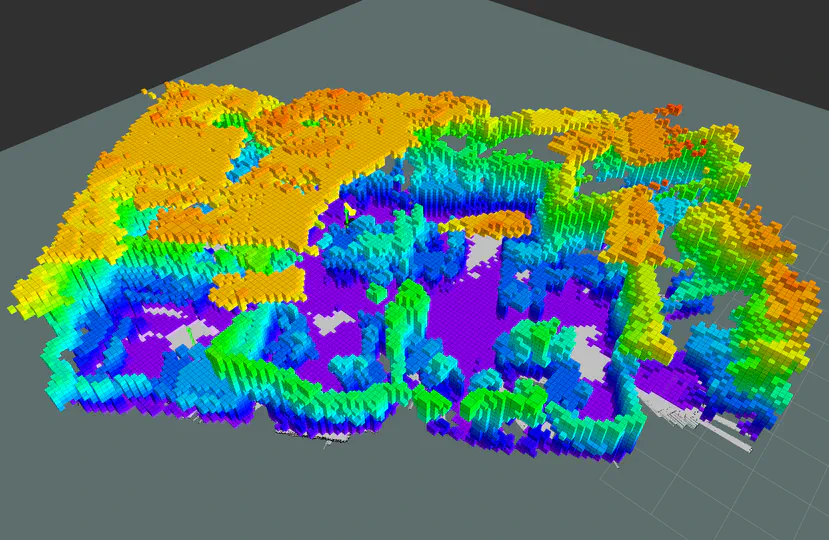
We published an open-source package on the ROS Wiki designed for exploring complex three-dimensional environments using a ground robot equipped with a ranging sensor. This package enables efficient navigation and mapping in challenging environments.