Autonomous Exploration and mapping of Complex 3D Environment
May 26, 2017
·
1 min read
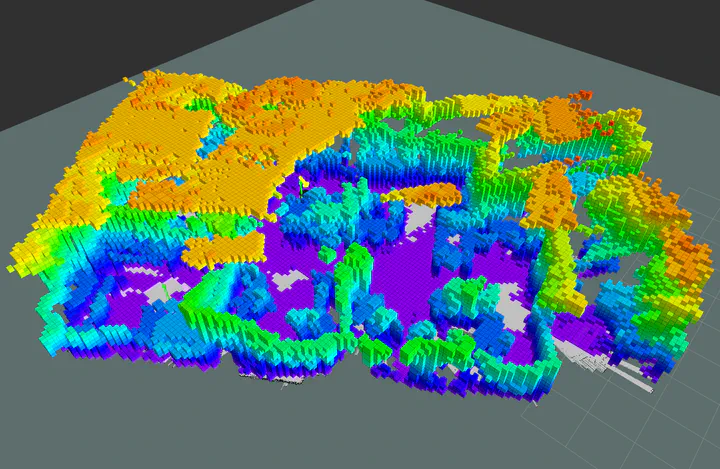
We published an open-source package on the ROS Wiki designed for exploring complex three-dimensional environments using a ground robot equipped with a ranging sensor. This package enables efficient navigation and mapping in challenging environments.